���n�}���Ƚ�B���n�}�ı����n�}�����x�Լ�����(n��i)���о��İl(f��)չ��r��������ؽ�B��ˮ݆�C�{(di��o)��(ji��)ϵ�y(t��ng)�ĎN��(j��ng)����Ʋ��Ե�ԭ���������˸��N���Ʋ��Եă�(y��u)�c�Լ�������������������ˮ݆�C�{(di��o)��(ji��)ϵ�y(t��ng)���Ʋ��Եķ���ģ������ˮ݆�C�{(di��o)��(ji��)ϵ�y(t��ng)�Ĕ�(sh��)�W(xu��)ģ�͞���A(ch��)���\��MATLAB���SIMULINK�������ˮ݆�C�{(di��o)��(ji��)ϵ�y(t��ng)С�_���µķ�������ˮ݆�C�{(di��o)��(ji��)ϵ�y(t��ng)���{(di��o)��������(sh��)�M�з������������{(di��o)��������(sh��)���{(di��o)��(ji��)ϵ�y(t��ng)�ӑB(t��i)Ʒ�|(zh��)��Ӱ�������\��C++builderƽ�_������(j��)ϵ�y(t��ng)��(n��i)������ģ�K�Ă��f����(sh��)���_��ˮ݆�C�{(di��o)��(ji��)ϵ�y(t��ng)���،���Ă��f����(sh��)�������뾀�Ի���ˮ݆�C�{(di��o)��(ji��)ϵ�y(t��ng)ģ���O(sh��)Ӌ�˷��������
ˮ���l(f��)늏S�nj�ˮ���D(zhu��n)�Q����ܵ����a(ch��n)��I(y��)��ˮ݆�l(f��)늙C�M�܉��ˮ���D(zhu��n)׃�������ݔ�뵽���ϵ�y(t��ng)�����Ñ�ʹ�����������ϵ�y(t��ng)��ؓ�ɕ��S�r׃���ģ��@�N׃����Ȼ��(d��o)��ϵ�y(t��ng)�l�ʵ�׃�����@��Ҳ��Ҫ��ˮ݆�l(f��)늙C�M������{(di��o)��(ji��)�й����ʵ�ݔ�����ԾS�֙C�M�D(zhu��n)�ټ�ϵ�y(t��ng)�l����Ҏ(gu��)��������(n��i)���@����ˮ݆�C�{(di��o)��(ji��)ϵ�y(t��ng)�Ļ����΄�(w��)��
ժҪ 2
Abstract: 3
һ �wՓ 6
1.1���� 6
1.2�O(sh��)Ӌ�n�}�ā�Դ��Ŀ�� 6
1.3�O(sh��)Ӌ�n�}�����x 7
1.4Ӌ�n�}�İl(f��)չ�vʷ�cڅ�� 7
�� ˮ݆�C�{(di��o)��(ji��)ϵ�y(t��ng)���Ʋ��ԾC�� 9
2.1���� 9
2.2 ��Ҏ(gu��)PID�{(di��o)��(ji��)���� 9
2.3���m��(y��ng)���� 10
2.4���ܿ��� 11
2.5�Ǿ��Կ��� 12
2.6�������Ʋ��� 14
2.7���Y(ji��) 14
�� ˮ݆�C�{(di��o)��(ji��)ϵ�y(t��ng)PID���Ʋ��� 15
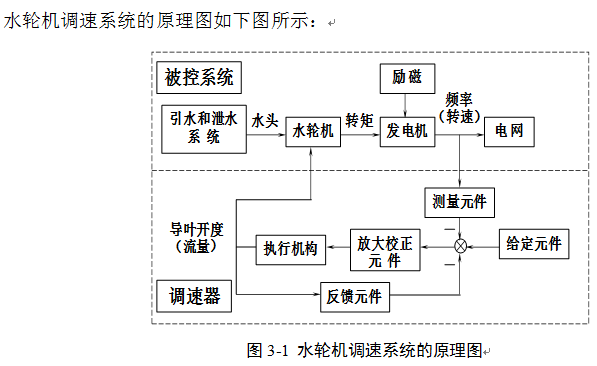
3.1 ˮ݆�C�{(di��o)��(ji��)ϵ�y(t��ng)����ԭ�� 15
3.2ˮ݆�C�{(di��o)��(ji��)ϵ�y(t��ng)�Ĕ�(sh��)�W(xu��)ģ�� 15
3.3ˮ݆�C�{(di��o)��(ji��)ϵ�y(t��ng)PID�����㷨ԭ�� 25
3.4ˮ݆�C�{(di��o)��(ji��)ϵ�y(t��ng)PID�����㷨�Č��F(xi��n) 26
3.5 ˮ݆�C�{(di��o)��(ji��)ϵ�y(t��ng)PID�㷨ܛ����D 26
�ģ��O(sh��)Ӌ�^�̼��Y(ji��)������ 27
4.1 ����MATLAB ��C++builder6.0�ķ��� 27
4.2 �O(sh��)Ӌ�^�� 30
4.3 �Y(ji��)������ 32
�壮���Y(ji��)�cչ�� 34
���x 35
�����īI 36
��� 38